Группа [исследователей] NESC идентифицировала два гипотетических сбоя контроллера заслонки ETSC-i (не связанных с неэлектронными причинами…), способных привести к внезапному ускорению автомобиля без генерации кодов диагностики – специфические ошибки в определении положения педали газа и систематические программные ошибки в вычислителе контроллера акселерации, которые не выявляются системой мониторинга автомобиля… Последний сценарий связан с открытием дроссельной заслонки без команды водителя и одновременным сохранением работоспособности систем непосредственного впрыска и зажигания. Непосредственное доказательство того, что эти сбои привели к выявленным авариям, группой не получены, но это не означает, что из-за них подобные аварии невозможны.
И вот, наконец, история пришла к завершению – 24 октября суд штата Оклахома
признал Toyota ответственной за инцидент шестилетней давности с присуждением полуторамиллионного штрафа.
А специалисты в области embedded-программирования по окончанию судебного процесса получили возможность открыть данные об экспертизе «прошивки» злополучного контроллера дроссельной заслонки.
И данные оказались далёкими от утешительных.
Итак, группа экспертов, информацию о которых можно легко отыскать на сайте «гуру embedded программирования» (EmbeddedGurus), после анализа firmware контроллера дроссельной заслонки пришла к выводу что (даю дословный перевод) «это позорный образец проектирования и разработки ПО».
В выводах – общее низкое качество кода, наличие ошибок в нём, которые могут вызывать случайный разгон автомобиля, общая система контроля и обеспечения безопасности исполнения кода организована по принципу «карточного домика», и, наконец, вердикт, к которому прислушались судьи – ошибки в firmware стали причиной аварии с тяжёлыми последствиями.
В ходе анализа злополучного контроллера экспертами были проверены и отклонены предположения Toyota, что ошибки являются следствием аппаратных сбоев в микроконтроллере NEC (Renesas) V850, а именно, в его интерфейсе с внешней памятью с контролем чётности. Что неудивительно даже без экспертного анализа, потому как контроллеры Renesas (некогда NEC) – в своём роде эталонные для автомобильной индустрии (и не только), и используются в неисчислимых количествах, о такой злополучной ошибке (явно приводящей к порче памяти) давным-давно знал бы весь мир, она или была бы исправлена в кремнии, или хотя бы внесена производителем в Errata (уточняющую документацию).
Вот, собственно, как выглядит этот самый вычислитель, из-за которого вся история, совершенно обычный встраиваемый компьютерчик, никакой rocket science, просто добротная плата с весьма традиционными для автомобильной индустрии компонентами (самая большая микросхема - тот самый NEC-Renesas V850):
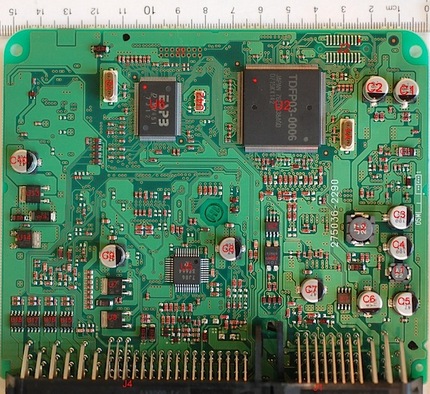
Контроллер дроссельной заслонки, по идее, не самое страшное, что можно придумать. По идее. Он считывает положение педали (или принимает его от другого контроллера по какой-то бортовой сети вроде CAN или более развитой надстройки над CAN, FlexRay). Если он сам считывает информацию, то выдаёт CAN-датаграмму об этом прочим контроллерам, и, само собой, формирует управляющий сигнал шаговому двигателю заслонки. Ещё он очевидно «завязан» в систему поддержания стабильной скорости (круиз-контроля). Собственно, это всё. Что подтверждается здоровенным прошлогодним тематическим документом от самой Toyota (
большой pdf-файл, только для любителей hardcore подробностей, он интересен потому что демонстрирует прошлогодние объяснения).
Ну а теперь держимся крепко за что можем держаться – в firmware, решающем эту задачу, надстроенным над операционной системой реального времени, экспертиза выявила…
одиннадцать тысяч глобальных переменных. Код реализации firmware назван хорошо знакомым всем программистам словом «spaghetti». Анализ цикломатической сложности программы выдал
67 не пригодных для тестирования функций, а ключевая функция определения угла дроссельной заслонки в ходе этого анализа показала какую-то удивительную оценку, при которой не только тестирование, но и вообще какое-либо сопровождение программы невозможно. Соблюдение отраслевого стандарта кодирования (для автомобильной промышленности такой есть, даже целое семейство, совокупно называемое MISRA) характеризуется выявленным числом его нарушений – их набралось 80 тысяч (в Toyota принят свой внутренний стандарт, который заимствует из MISRA всего 11 правил, при минимально требованных во время написания кода 93-х). По ходу дела было выявлено, что в такой сложной системе полностью отсутствует учёт сбоев и ошибок. При всём этом великолепии все связанные с безопасностью функции контроллера в его «прошивке» оказались реализованными одним единственным процессом. Тема отдельного разговора – watchdog. В «настольном» программировании это нечастое явление, в мире встраиваемых систем – необходимая функция. Watchdog или сторожевой таймер – обычно внешнее по отношению к вычислителю устройство (хоть бы и реализованное на одном с вычислителем кристалле). Принцип его работы предельно прост – если какой-то процесс вовремя не сбросил ранее выставленный на какое-то время страбатывания сторожевой таймер, последний вызовет аппаратное прерывание, оповещающее вычислитель, что с процессом что-то явно не так, или вообще инициирующее быстрый системный сброс. Использование watchdog в «прошивке» вызвало большие сомнения у экспертов – подконтрольным сторожевому таймеру в этой системе оказался по сути только процесс, обслуживающий редкие прерывания системного таймера, что означает – любой сбой в обработчике прочих прерываний мог приводить к исполнению неизвестно чего примерно… полторы секунды до сброса вычислителя от сторожевого таймера. И эксперты не взялись утверждать, что эти полторы секунды до сброса гарантированы, они не исключили возможности, что сброс вообще не наступит. Напоследок не менее прекрасное – коды возврата большинства вызовов RTOS, которые предназначены для сообщений об ошибках, в «прошивке» вообще игнорируются.
Дальше начинается архитектурное. Не менее красивое. Основной вычислитель (неповинно обвинённый в грехах NEC-Renesas V850) мониторится дополнительным микроконтроллером с «прошивкой» от стороннего производителя, которая выходит за границы ответственности Toyota. Да, это хорошо, когда есть независимый мониторинг. Но каким образом единственный аналогово-цифровой преобразователь, который как раз и предназначен для считывания аналогового сигнала положения педали газа оказался мало что не зарезервированным (продублированным), но ещё и интегрированным именно в этот второй микроконтроллер – это даже трудно сказать кто такое придумал. Точности-то от такого преобразователя нужно всего ничего (ну какая может быть прецизионность в нажатии на педаль газа), АЦП такого класса совершенно копеечные и прекрасно отработаны, и вот такая экономия, формирующая потенциально сверхопасную «точку критического сбоя» (single point of failure). Изящное решение оказалось адекватно поддержанным на уровне кода – отказоустойчивый код сопроцессора-монитора оказался зависимым от неназванной из принципов соблюдения промышленных секретов функции, выполняемой основным микроконтроллером, причём на эту одну функцию взвалили кучу всего – от преобразования угла педали в угол дроссельной заслонки до управления в режиме круиз-контроль и даже до диагностики.
Прямо скажу – когда я читал оригинальные статьи и дошёл до одиннадцати тысяч глобальных переменных, используемых в системе реального времени, где любое лишнее находящееся в общем для всех процессов доступе состояние – уже большая проблема, мне стало как-то не по себе. И потому хочу ещё раз напомнить, о чём писал в прошлый раз.
Без сомнения, этот странный код для Toyota писали не школьники и не студенты. И проектировали вычислитель, оказавшийся тоже весьма загадочной архитектуры, вовсе не профаны. Без сомнения и слава богу, что вроде как это не во всех моделях машин такое, что всё это выявлено и локализовано, что в Toyota после такого кошмара (есть такие специально обученные люди, занимающиеся репутационным менеджментом, так вот я им, которые из Toyota, очень не завидую) всерьёз улучшат разработку и тестирование firmware.
Но этот наглядный пример в контексте рвущегося в ширь и ввысь IoT (Internet of Things) надо бы не забывать. Надеюсь, что индустрия его не проигнорирует. Уже не получится. Потому что шум поднялся на весь мир.
Откланиваюсь.





 вам ресурсе увидел твой пост с Теслой.
вам ресурсе увидел твой пост с Теслой. 


